Update – 10.07.15 – nach 30 Flügen

Ich habe mit dem Acrocopter nun ca. 30 Flüge gemacht und wollte ein kurzes Resümee geben.
Was für eine Maschine!
Die Beschleunigungen sind verrückt! Nachdem ich im GUI der MultiWii Software die Ausschläge (Rate) auf ca. 800°/s Drehraten bei Vollausschlag hoch gezogen habe, ist der Acrocopter sehr sehr wendig. Ich habe eine Weile gebraucht um mich an die Steuerung zu gewöhnen. Jetzt sind dafür aber knappe Flüge übers Feld mit geschätzten 80km/h, 8-fach Drehungen, und spiralförmige Abstiege usw. möglich. Ich kann da noch viel lernen.

Belastbarkeit
Nach einigen Crashs war es soweit, dass ein Ausleger gebrochen ist. Die Bruchstelle, kurz vor dem Motor habe ich wohl zu klein dimensioniert. Das wird bei der nächsten Überarbeitung verbessert.
Die Motoren sind sehr crashresistent bzw. der Rahmen fängt viel Energie ab. Propeller müssen häufiger getauscht werden.
Es spielt, leicht nachvollziehbar, eine sehr große Rolle auf welchem Untergrund der Copter aufschlägt. In einem Weizenfeld konnte ich viele Abstürze ohne auch nur einen Propeller zu verlieren geschehen lassen. Auf getrockneter und festgetretener Erde oder Steinen fliegen die Fetzen. Zum Training daher lieber eine mittelhohe Wiese oder Felder aufsuchen – dann sind die Kosten gering ;).
Und ja, der Copter ist sehr portabel, ein immer-dabei Liebling, wenn man ihn fliegen kann.
Idee
Disclaimer: Einige werden es bereits beim Titelbild merken. Das Rahmenkonzept ist von r0sewhite (Rachel) inspiriert und hat deshalb gewisse Ähnlichkeiten. Dennoch flossen eigene Überlegungen und Berechnungen in die Konstruktion ein.
Ich merke zunehmend, wie mir das fliegerische Können entgleitet, wenn ich immer die großen, vollends stabilisierten und GPS-, Kompass- und Barometergestützten Octocopter fliege. Um dem entgegenzuwirken, mein pilotieren auf Vordermann zu bringen und um ebenso einen Flitzer zu besitzen, wie ihn warthox um den Modellflugplatz jagt, entschloss ich mich einen Acrocopter zu bauen. Die Bezeichnung „Acrocopter“ ist selbstbezeichnend und hebt die Agilität hervor.

Konzept
Der Rahmen soll ein „immer-dabei“ Rahmen sein, den man gerne in seinen Rucksack schmeißt und so gern und gut mitnehmen kann. Für wendige Quadrocopter sind 8“ Propeller meiner Meinung nach das Maximum. Der Rahmen wurde eben um diese Größe herum konstruiert.
Zudem sollte er maximale Crashresistenz besitzen, sprich bei hohen Belastungen sich nicht plastisch verformen, wie es die Aluminiumrahmen gerne tun. Deshalb wurde CFK als Werkstoff gewählt.
Elektronik
Die Steuerung soll mit MultiWii erfolgen. Dafür habe ich mir einen Arduino pro micro und den Sensor MPU6050 bestellt – ein gängiges Setup. (12€)
Die Regler sind die
KISS ESC 2 4S 18A v1.1 von Flyduino. Ich verspreche mir durch die leichte und elegante Bauweise, sowie gute Software eine gute Effizienz und Leistung. (
75,60€)
Antrieb
Als Motoren verwende ich die
MULTISTAR 2213-980 (es gibt mittlerweile eine Version 2), da ich noch zwei hier zu Hause liegen hatte. (
$66,20)
Die Propeller sind klassische
Gemfan 8“x4,5“ (20,32mmx11,43mm). Diese gibt es auch in einer mit Kohlefasern verstärkten Ausführung (CF), die mehr Stabilität und geringeres Flattern in der Längsachse verspricht. (
4,20€)
Für die Befeuerung der Antriebe verwende ich einen Lithium-Polymer (LiPo) Akku mit 4 seriell geschalteten Zellen (4S) und 1600mAh Kapazität bei einer Entladerate von 20C (36A Belastung dauerfest)
Turnigy 1800mAh 4S 20C Lipo.
Rahmen
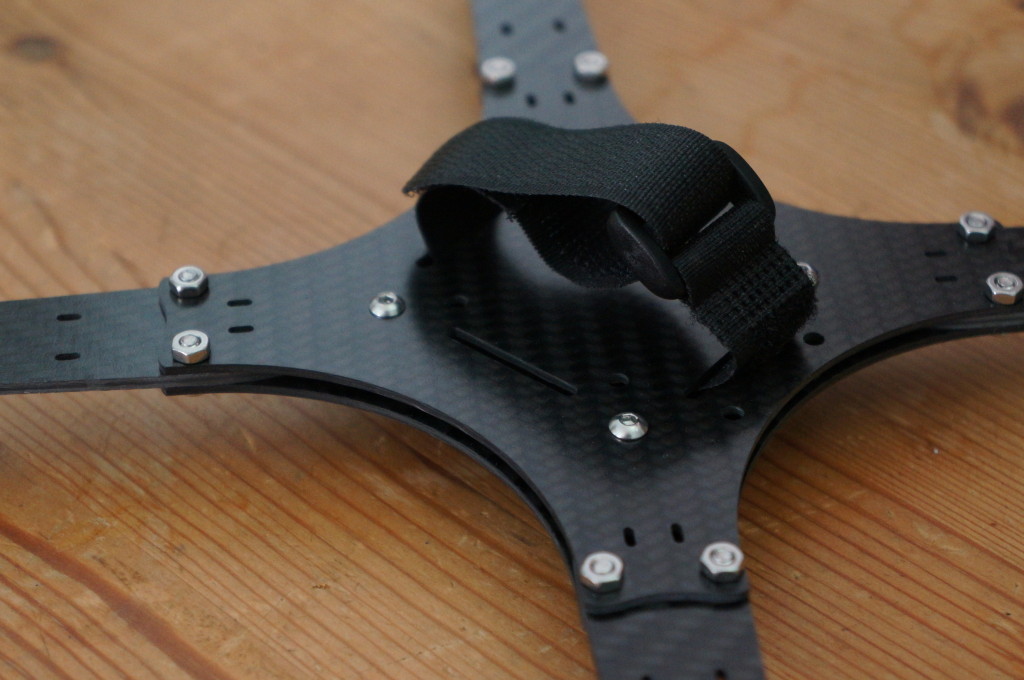
Der Rahmen ist 6-teilig, um modulbar und damit einfach austauschbar zu sein. Jeweils eine Ober- und Unterplatte aus 1,5mm starkem CFK an die die 4 Arme geschraubt werden, die aus 2,5mm CFK gefräst sind. Verschraubt werden alle Teile mittels V2A M3 Linsenkopfschrauben mit Innensechskant.
Die Arme besitzen bereits Löcher zur Befestigung der Regler und Kabel mittels Kabelbinder. Alle gängigen Motoren können dank der Langlöcher auf den Rahmen geschraubt werden.
Unten findet je nach Akkugröße und Flugrichtung der Battery-Strap bzw. das Klettband zur Befestigung des Akkus platz.
Die Bohrungen auf der Oberplatte passen für Platinen mit 45mm Lochabstand als auch für 30mm Lochabstand. Damit sollten alle gängigen Flugsteuerungen auf diesen Rahmen passen (z.B Mikrokopter Fl-Ctrl., MW32, KK-Board etc.).
Eine mechanischen Schutz der Steuerung wird in naher Zukunft folgen.
Aufbau
Der Aufbau gestaltet sich denkbar einfach.
Zunächst alle Rahmenelemente miteinander verschrauben. Dabei kann schon jetzt ein Akkukabel (je nach verwendeter Größe) von der Mitte des Rahmens herausgelegt werden. Ich verwende zum Schutz der Litzen noch einmal Gewebeschlauch.
Nun folgen die Antriebe. Die Kabel müssen entsprechend der Regler gekürzt werden und mit den Reglern verlötet werden. Dabei die Drehrichtung beachten. Sollte man sich nicht sicher sein, diesen Schritt erst am Ende ausführen!
Die KISS Regler habe ich erst am Ende eingeschrumpft – die Drehrichtung ist dort jedoch einfach mittels Jumper umkehrbar.
Die Regler und Leitungen müssen mittels Kabelbinder am Rahmen fixiert werden. Dabei keine Kabel quetschen oder unter Spannung festziehen.
Um allen Reglern Strom zuzuführen muss jeder mit der Akkuleitung verlötet werden. Dazu alle Litzen einer Polarität verdrillen und zu einem „Knoten“ verlöten, nach Bedarf (LEDs, Spannungsregler) noch weitere Leitungen herausführen, alles einschrumpfen und verstauen.
Nun sollte die Steuerung in der Mitte mit korrekter Ausrichtung eingebaut werden. Dafür die Signalkabel der Regler ggf. kürzen und an die Steuerung anlöten oder stecken. Die Steuerung mit Strom versorgen (5V mittels Spannungsregler oder direkt Bordspannung). Hier der Verdrahtungsplan für einen Arduino Micro über den I2C Bus mit der MPU6050, wie er von mir verwendet wurde.

Weiter muss nun der Stecker an der Leitung zum Akku hin angelötet werden. Hier sauber arbeiten und gut schrumpfen, da der Stecker durch das häufige Stecken Belastungen ausgesetzt ist. Die Leitung oben mit einem Kabelbinder vom Zug entlasten.
Schlussendlich muss der Empfänger einen Platz finden und die Antennen möglichst 90° versetzt an den Auslegern unten entlang geführt werden. Je weitere die Antennen vom CFK entfernt sind, so geringer die abschirmende Wirkung.
Einstellungen
Nun, da alles angeschlossen ist, kann die Flugsteuerung mit der aktuellen Software bespielt und die Laufrichtung der Motoren überprüft werden. Auch die Steuersignale sollten geprüft werden.
Bei Verwendung der MultiWii Plattform kann die kostenlose Software MultiWiiConf genutzt werden, die als vollständiges GUI das Einstellen erleichtert.
Sind die Propeller montiert, kann ein erster Test gemacht werden. Dabei den Copter fest in der Hand halten und von der Drehebene der Propeller Abstand halten. Reagiert der Copter in der gewünschten Richtung? Vibriert der Rahmen stark? Wie sehen die Sensorwerte aus?
Je nach verwendeten Propellern sollten diese gewuchtet werden, um Vibrationen, die den Sensoren Probleme bereiten, zu vermeiden.
Passt alles ist der Copter bereit für den Erstflug. Den Laptop mitnehmen und vor Ort die PID-Regler den eigenen Wünschen anpassen (MultiWii).
Viel Freude beim Fliegen!
Downloads
Da ich zunächst kein gewerblichen Zweck mit dem Acrocopter verfolge, stelle ich die Zeichnungsdatei gerne dem Interessierten zur Verfügung. Gewerblich dürfen die Zeichungen nicht genutzt werden.











Scheint ein gut durchdachter Quadrocopter zu sein. Baue gerade auch ein kleines 250 FPV Modell, nur mit kleineren Auswirkungen aufs Portemonnaie. 😀
Hallo Lucas,
danke fürs Lesen des Blogs!
Wenn du deinen Quadrocopter aufgebaut hast, gib‘ bescheid. Würde mich interessieren, wie der fliegt ;).